Automatic control for airborne wind energy systems
We develop new observation and control algorithms for airborne wind energy systems – from control theory to on-site experiments
















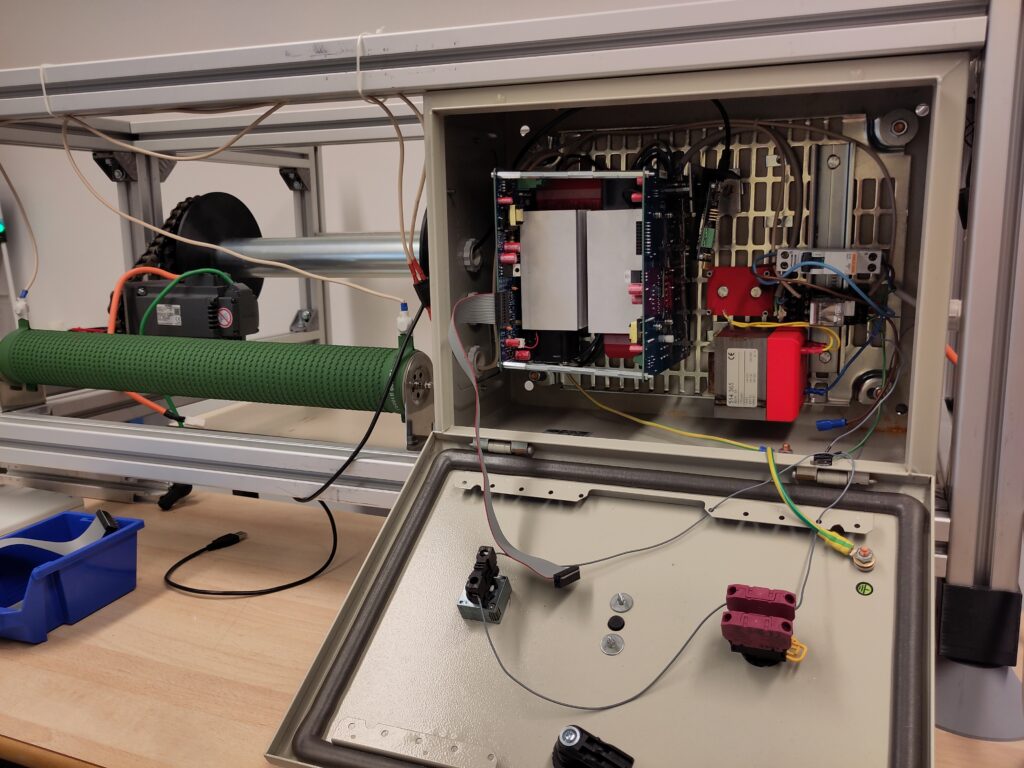
Design of a low-tech ground station
We design a new ground station for a small-scale, ground-gen, soft wing airborne wind energy system.
Low-Tech
Just what’s needed : two 1kW motors and inverters for steering and control, plus two small DC motors for winding the systems.
Low wind takeoff
All actuators are on ground: only sensors remain on board, making the airborne system lighter, and allowing for takeoff at low wind speeds.
Versatile
The ground station turns into a bicycle trailer to be towed to the test site.
Realistic testing
Designed to produce 1.5 kW, the systems will embed batteries and a discharge resistor acting as a load, as well as a spooling system able to stow 150m of tether.
Standard components
Each motor is driven by a STM32 Nucleo board, and the central computer is a Raspberry Pi.
Experimental data
All sensor data will be automatically stored as timeseries on a USB memory stick using CSV files. This will allow for a fast post-processing.
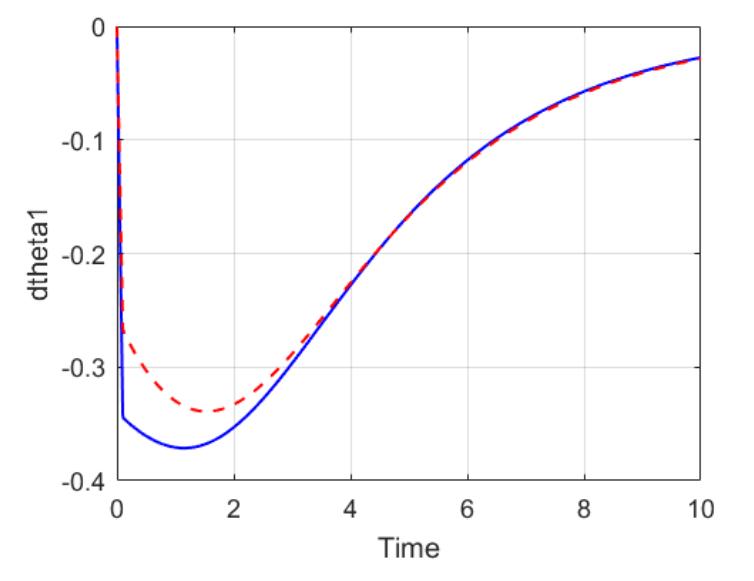
Advanced automatic control
Using Lie group theory, we design precise tether and kite models to improve estimation and control algorithms for AWE systems
Lagrangian dynamics on manifolds
- Global model for high fidelity
- No sigularities
- Compact equations and geometric properties
Nonlinear control
- Robustness to out-of-nominal conditions
- Exploiting geometric properties of models
- Formal guarantees of stability
Detailed models
- Exploiting static and dynamic properties of Dyneema
- Experimental validation upcoming

